|
|
|
|
|
|
Network Security Projects
Wireless Sensor
Networks (WSN)
WSN course modules
The
Advanced Research Programs (ARP) of the Texas Higher Education Coordination
Board (THECB) has funded a team of UHCL researchers to develop a WSN
experiments over a period of 2007-2009. As the head of the project, Dr.
Yang has led the team in developing labs for supporting research and
teaching of network security, including wireless networks. The work
proposed in this proposal is focusing on developing secure and effective
algorithms for WSN for Human Detection and tracking, and integrating a WSN
Test Bed into the existing computer security labs. The DCSL, currently
providing ample space to host the network devices and security appliances
of the DCSL network, will be used to host the WSN Test Bed. Secure and
Optimized Communication & Organization for Target Tracking in Wireless
Sensor Networks (SOHO) proposal was submitted to the THECB in April 2006
for the Advanced Research Programs grant. The proposal was accepted and
completed by 2008.
|
|
WIRELESS SENSOR NETWORK
|
|
|
|
|
INTRODUCTION TO OCO
|
|
|
Wireless sensor networks (WSN) have major impact upon
military and civil applications, including environment monitoring, target
surveillance, industrial process observation, tactical systems, space and
planetary explorations, etc. One of the most important tasks in WSN
applications is target tracking, in which the WSN is employed to detect
intruders.
A sensor node is typically limited in its processing power, battery
life, and radio strength. In addition, due to the environments where the
WSN is typically deployed, physical security is usually not available. The
successful design of a WSN depends on how well those challenges are
addressed. When using a WSN in tracking moving objects, we have identified
five critical requirements: (i) accuracy, (ii) energy efficiency, (iii)
optimized computation, (iv) re-configurability, and (v) secure
communications. The goal is to maximize the WSN’s lifetime while
ensuring accuracy of target tracking and secure operation of the WSN.
Existing methods, such as the LEACH-based algorithms, either suffer
redundancy in data and sensor node deployment, or require complex
computation. There exists a demand for self-organizing and routing
capabilities in the WSN. We have devised OCO (Optimized Communication and
Organization), which is an efficient method that builds and maintains a WSN
with self-organizing and routing capabilities. We have conducted
simulation-based experiments to evaluate OCO against two other methods,
LEACH and Direct Communication (DC), under various scenarios. OCO appears
to have met the first four requirements of an efficient WSN. The results of
the evaluations were accepted for publication in referred forums, including
the 2006 ACM SIGCSE Technical Symposium and the IEEE Int. Conf. on Sensor
Networks, Ubiquitous, and Trustworthy Computing.
OCO seems to have met the first four requirements of an efficient
WSN for target tracking. To ensure secure operations of OCO, the next step
is to extend OCO by adding security features. We propose to integrate data
confidentiality and authentication into OCO. In addition to using
simulation-based methods to evaluate the OCO algorithms, we propose
building a WSN Test Bed, with real sensor boards and microcontrollers, as a
research and education platform on which faculty and students may explore
the cutting-edge knowledge and practice of wireless sensor network
development and applications.
|
|
|
OCO VERSUS DIFFERENT METHODS
|
|
|
When using a WSN in tracking moving objects, we have
identified five critical requirements: (a) Efficient energy dissipation
– The goal is to increase the overall longevity of the WSN.
(b) Accuracy of target detection – The primary goal is to ensure
consistent accuracy without sacrificing the network’s longevity.
(c) Optimized computation – Due to the limited battery power stored in
a sensor, computation performed on the sensor must be optimized, in order
to incur minimum energy dissipation.
(d) Re-configurability – When one or more of the sensors cease to
function, the network should be able to self-organize or re-configure
itself, in order to re-construct a functional WSN allowing the mission to
be continued.
(e) Secure communications – In the context of WSN security, security
features such as authentication, data integrity, confidentiality, and
availability are needed.
|
|
|
There
exist three main approaches for target tracking in WSN: tree-based,
cluster-based, and prediction-based [1]. Existing methods such as the
LEACH-based algorithms [3] suffer problems such as complex computations,
redundant data, and redundant sensor deployment. Those drawbacks result in
energy use inefficiency and/or expensive computation overhead.
To
tackle these problems, the PI and his students have devised OCO (Optimized
Communication and Organization), an efficient method providing
self-organizing and routing capabilities to a WSN. OCO ensures maximum
accuracy of target tracking, efficient energy dissipation, and low
computation overhead. An OCO-based WSN is re-configurable, meaning it can
self-organize itself when some of the nodes cease to function. We have
conducted simulation-based evaluations to compare OCO against LEACH and
Direct Communication (DC).
|
|
|
|
|
METHODOLOGY
|
|
|
OCO
includes 4 phases: (a) position collection, (b) processing, (c) tracking,
and (d) maintenance.
|
|
|
|
A.
Position collection phase: In this phase, the base collects
positions of all reachable nodes. When the sensor nodes are first deployed
in an area, the base starts sending messages to its neighbors to gather
their IDs and positions, and advertising its own ID as the parent of the
neighbors. Each of the base’s neighbors, after sending its ID and
position to its parent, marks itself as recognized, and then performs the
same actions as the base by collecting IDs and positions from their
neighbors, and advertising itself as the parent. Note that, when a node
gets the position and ID from a neighbor, it forwards the information to
its parent. This process continues until the message eventually reaches the
base.
|
|
|
|
B. Processing phase: In this phase, OCO applies
image processing techniques to clean up the redundant nodes, detects the
border nodes, and finds the shortest path from each node to the base.
(i) Clean up redundant nodes: Table 1 is the algorithm removing redundant
nodes. A redundant node is a node whose sensing zone is occupied by one or
more other nodes. To identify redundant nodes, we first build a
geographical binary image representing the coverage zone of the network.
(ii) Define the border nodes: Nodes positioned along the border of the
network are border nodes. To identify these nodes, we first apply the
border detection algorithm (Table 2) to identify a list of points (border
points) that traverse the border of the image. Finally, find a minimum set
of nodes in the Area_List that contain all the border points, which are the
border nodes.
(iii) Find the shortest path to the base: The algorithm is given in Table
3.
|
|
Table 1: Algorithm for Removing Redundant Nodes
|
|
1. Build a geographic image of
the network by assigning color value = 1 for all points that is covered by
at least one sensor node. The rest of the points are assigned color value =
0. (Note[1])
|
|
2. Initialize a list of nodes
that are supposed to cover the whole network area, called Area_List. Assign
Area_List = null.
|
|
3. Add the base node to the
Area_List.
|
|
4. For all the nodes in the
area, if a node is not overlapping with any node in the Area_List, add it
to the Area_List. The purpose of this step is to optimize node
distribution.
|
|
5. For each point in the network
area, if the point is not covered by any node in the Area_List, add the
node that contains the point to the Area_List.
|
|
6. Nodes that are not in the
Area_list after the “for” loops in steps 3, 4, and 5 are
redundant nodes
|
|
Table 2: Algorithm for Finding the Border
|
|
1. For each pixel in the image,
check if the color value =1.
|
|
2. If true (meaning this pixel
belongs to an object), scan all its neighbors to see if any of them having
the color value = 0. If true, this pixel belongs to the border.
|
|
Table 3: Algorithm for finding the shortest path to the
base for each node in the Area_List
|
|
1. Work only with nodes in the
Area_List of the ‘cleaning up redundant nodes’ step (Table 1).
|
|
2. Assign parent_ID = 0 for all
nodes.
|
|
3. Assign parent_ID = the base’s
ID for all neighbors of the base and add these nodes to a list, called
Processing List.
|
|
4. For each node in the
Processing List, consider all its neighbors. If the neighbor has parent_ID
= 0, assign the neighbor’s parent_ID = the node’s ID. Add the
neighbor to the Processing List.
|
|
5. Repeat step 4 until all nodes
are assigned parent_ID.
|
|
6. After the loop, each node in
the Area_list has a parent_ID. When a node wants to send a message to the
base, it just delivers the message to its parent. The message is then
continually forwarded until it reaches the base. The algorithm ensures that
all the messages will reach the base through a minimum number of hops.
|
|
C.
Tracking phase: In the tracking phase, the sensor nodes all work
together to detect and track intrusion objects. Objects are assumed to have
come from the outside. Normally, only the border nodes are ACTIVE. When a
border node detects an object, it periodically sends its position
information to the base by first forwarding the information to its parent.
|
|
D.
Maintenance phase: The purpose of this phase is to reconfigure the
WSN when the need for topology change arises. Such changes include ‘exhausted
nodes’, ‘damaged nodes’, ‘re-positioned nodes’,
etc. In the case of exhausted nodes, when the energy level of a node is
below a threshold, it turns all its children to SLEEP and sends a report to
the base. When the base gets the report, it enters the processing phase to
reconfigure the network, with dead nodes being removed and the network
restructured.
|
|
[1]
Note that the sensor network area is defined by a rectangle of (x_min,
y_min, x_max, y_max), in which x_min and x_max are the min and max values
of x, and y_min and y_max the min and max values of y in the collected
positions.
|
|
METRICS
|
|
Four
metrics are used in evaluating the methods:
|
|
|
|
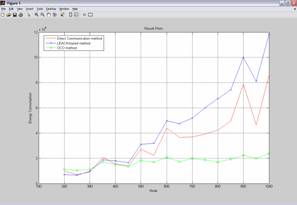
(a)
Energy consumption measures the total energy consumed by the nodes after
the simulation is started.
|
|
|
|
(b)
Accuracy is the number of detected positions of the intruding object(s) in
a given method, compared to the number of detected positions in the DC
method, which is used as the base of comparisons
|
|
|
|
(c)
Cost per detected position is the ratio between energy consumption and the
number of detected positions.
|
|
|
|
(d)
Time before the first dead node is the time when the first node of the
network runs out of energy
|
|
|
|
Out
of the proposed work, the existing OCO method will be extended. The
extended method(s) will be evaluated by using the existing simulation-based
evaluation environment . New metrics and models will be built to evaluate
the security of the OCO-based sensor network.
|
|
|
Top
|